
 Tre anni fa Maxim Lyashko, un ingegnere 28enne di Norilsk, ha perso la mano destra mentre lavorava in miniera. Ma questo grave incidente non l’ha steso.
Tre anni fa Maxim Lyashko, un ingegnere 28enne di Norilsk, ha perso la mano destra mentre lavorava in miniera. Ma questo grave incidente non l’ha steso.
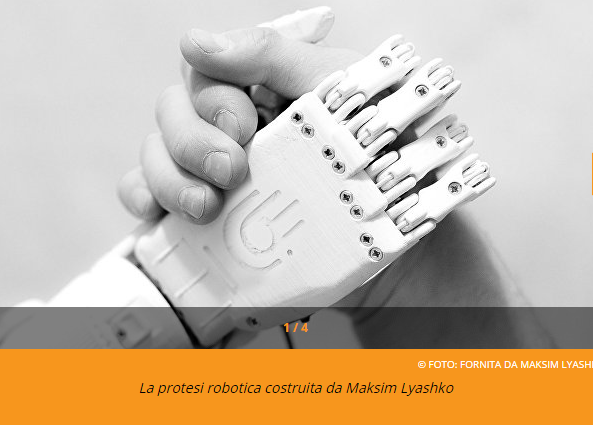
“Grazie a Dio, ho ancora la testa”, — dice l’ingegnere. Dopo aver sperimentato personalmente le difficoltà incontrate dalle persone senza arti, Maxim ha deciso in proprio di sviluppare una mano bionica come protesi.
Il progetto di Lyashko si chiama “MaxBionic”. La campagna per raccogliere fondi per il suo progetto è iniziata sulla piattaforma russa Boomstarter lo scorso 30 maggio. L’obiettivo è raccogliere 1,5 milioni di rubli (circa 20mila euro) per lo sviluppo della versione “open source” della protesi, che può essere prodotta da casa su una stampante 3D.
La protesi di MaxBionic costerà non più di mille dollari, mentre il costo medio della protesi, secondo Lyashko, varia dai 25mila ai 250mila dollari.
La raccolta su Boomstarter rischia di fallire dal momento che sono stati raggiunti solo 500mila rubli (meno di 10mila euro) e mancano 20 giorni alla fine della campagna. Maxim Lyashko ha raccontato come sviluppare ulteriormente il progetto: “Ora ho cominciato a preparare il terzo prototipo della protesi in metallo, diventerà il modello della produzione in serie. Senza batteria pesa esattamente 400 grammi. La protesi è dotata di un proprio pannello di controllo.
Per ridurre i costi delle tecnologie del progetto tra luglio e agosto ho intenzione di sviluppare propri sensori elettromiografici e li testerò. I componenti esteri sono costosi, per esempio, il sensore di produzione della compagnia Otto Bock costa 44mila rubli (circa 600 euro), mentre in Russia il più economico è sui 12.500 rubli (150 euro circa).
Nello schema classico occorrono almeno 2 sensori. Creare un prodotto che costerà centinaia di volte meno rispetto ad un analogo straniero, ma non inferiore in termini di qualità e prestazioni, sarà possibile solo con uno sviluppo autonomo. Non utilizzeremo componenti stranieri, ognuno dei quali aumenta notevolmente i costi. Ad esempio un motore tedesco costa dai 150-300 dollari. Se ne servono 5, già si parla di oltre mille dollari. I collegamenti e gli ingranaggi sono tutti nostrani.
Il senso del progetto “open source” consiste nel fatto che una persona da casa possa riprodurre la protesi con un minimo di attrezzature. Per quanto riguarda i modelli di produzione in serie, saranno utilizzate le tecnologie di produzione industriale. Naturalmente è impossibile produrre in serie da casa. Detto in altri termini, saranno in sostanza 2 prodotti con caratteristiche diverse.
Il tempo per le impostazioni della protesi dura circa 10 minuti. Ho creato il mio software che viene installato sul computer. Gli analoghi stranieri non hanno il proprio programma, di solito lavorano attraverso il terminale. Ho scritto un programma speciale, ha i propri grafici che mostrano il funzionamento dei sensori: grazie a loro è molto comodo regolare la protesi, in particolare cercare il posto sulla mano dove posizionare i sensori. Nella protesi è installato il motore, che aziona il movimento. Più il motore gira veloce, meno forza è richiesta. Più lento gira, più lo sforzo è maggiore. Quando ho fatto il secondo prototipo, ho dato la priorità allo sforzo. La protesi non è una mano viva. Le persone sane fanno centinaia di movimenti su cui non prestano attenzione, avviene intuitivamente.
Bisogna comprendere che la protesi non è collegata al cervello, pertanto non si riuscirà a schioccare le dita. Più la protesi lavora fluidamente, più è facile lavorare con essa.
Quando funziona troppo velocemente, le persone non riescono ad afferrare gli oggetti. E’ meglio attendere qualche secondo, ma avere una presa di qualità al primo tentativo.
Ho fatto la protesi basandomi sulle mie sensazioni, come persona senza una mano, e sulla base dell’esperienza delle persone che usano direttamente le protesi, non ho preso a modello le persone sane che vogliono farle funzionare molto rapidamente.
Negli Stati Uniti e in Gran Bretagna sono diffusi i progetti “open source”, inoltre è più facile raccogliere fondi per il loro sviluppo. Da noi è un problema reale. Sono al 90% sicuro che la somma che serve non verrà raccolta. L’obiettivo principale è la produzione in serie. La versione “open source” andrà nel dimenticatoio. Ho voluto fare un progetto puramente russo e realizzarlo qui. Ad esempio col nuovo prodotto in USA e Germania saturano il mercato nazionale.”